Geometric calculation#
BrachioGraph is an arm-writer - it moves the pen by adjusting the angles of its arms. All its movements are rotational - it can only move in curves. This has some consequences that make it challenging to draw with.
Whether it needs to move one arm or both to move the pen from one point to another, what it draws will not be a straight line. The shortest distance between two points might be a straight line, but the simplest movement between them is certainly not. Simply moving the motors to the correct position for the end-point will draw a curved line rather than a straight one.
Instead, it’s necessary to break down any straight line into a series of much shorter lines along its length - enough to make the line as straight as possible. The movement of servo motors is rather coarse, which is why all the lines a BrachioGraph produces are wiggly.
The mathematics#
A physical plotter instance is modelled with a BrachioGraph instance. Given x/y co-ordinates, a plotter
must be able to derive the appropriate motor angles.
Translating co-ordinates to angles#
In this example, the arms are both 9cm long and the pen is at x=4, y=10.
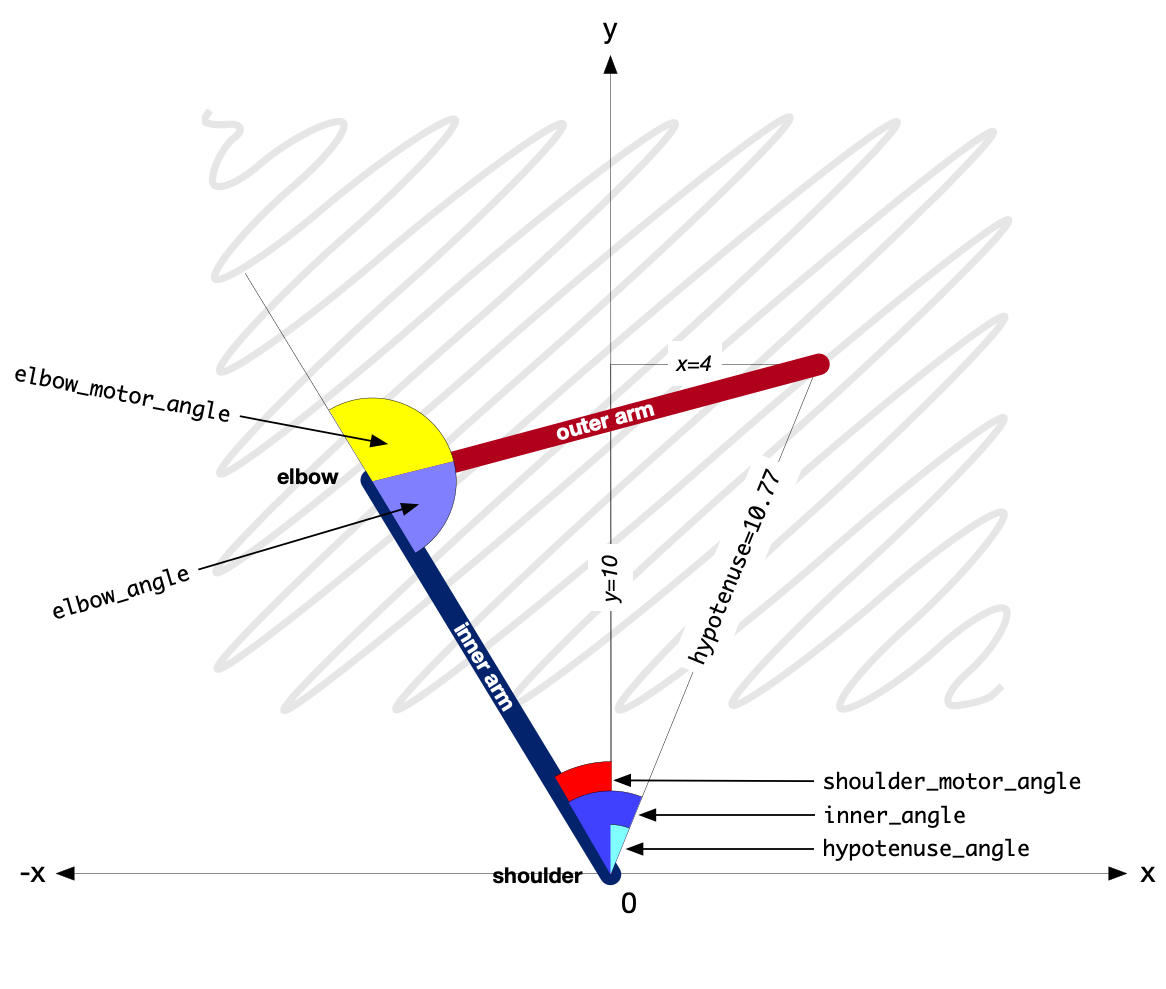
The xy_to_angles() method receives x and y co-ordinates as arguments. The first thing it does is find a line
from the origin (the shoulder motor) to the pen, and its angle from the y-axis:
hypotenuse = math.sqrt(x ** 2 + y ** 2)
hypotenuse_angle = math.asin(x/hypotenuse)
Given x=4, y=10, hypotenuse is 10.77, and its angle from the y-axis (hypotenuse_angle) is 21.8 degrees
(0.38 radians).
The hypotenuse line, the inner arm and the outer arm form a second triangle. All their lengths are known, so we can find the angle between the line of the hypotenuse of the first triangle and the inner arm:
inner_angle = math.acos(
(hypotenuse ** 2 + self.inner_arm ** 2 - self.outer_arm ** 2) / (2 * hypotenuse * self.inner_arm)
)
which is 53.25 degrees. The hypotenuse_angle minus the inner_angle gives us the angle of the shoulder motor
(from the y-axis):
shoulder_motor_angle = hypotenuse_angle - inner_angle
in other words, -31.45 degrees. So now we know what angle to set the shoulder motor to.
And similarly, we can find the angle at the elbow, between the inner and outer arms:
outer_angle = math.acos(
(self.inner_arm ** 2 + self.outer_arm ** 2 - hypotenuse ** 2) / (2 * self.inner_arm * self.outer_arm)
)
The angle of the outer arm relative to the inner arm is 180 degrees (or π radians) minus the outer_angle:
elbow_motor_angle = math.pi - outer_angle
Finally we convert the angle values to degrees and return them:
return (math.degrees(shoulder_motor_angle), math.degrees(elbow_motor_angle))
Translating angles to co-ordinates#
Obtaining angles from co-ordinates is essentially the reverse process, in angles_to_xy(). This method isn’t
actually used in the BrachioGraph, but can be useful when experimenting.