3. Wire up the plotter#
Important
Make sure the Raspberry Pi is turned off while you’re wiring it up.
Although the Raspberry Pis can take a frankly amazing amount of abuse, you run the risk of causing damage if you get the wiring wrong. Do it with the power off, take your time, and double-check your work.
The three servos need to be connected to the Raspberry Pi. Each servo has three wires:
5V (power) - usually orange or red
Ground - usually brown
Signal - usually yellow
5V and ground are required to power the servo; the signal wire carries a pulse, whose width (its length in microseconds) determines the position of the motor.
At least two of the servos will need to share a 5V connection, since the Raspberry Pi has only two available. How you achieve this will depend on what you have available.
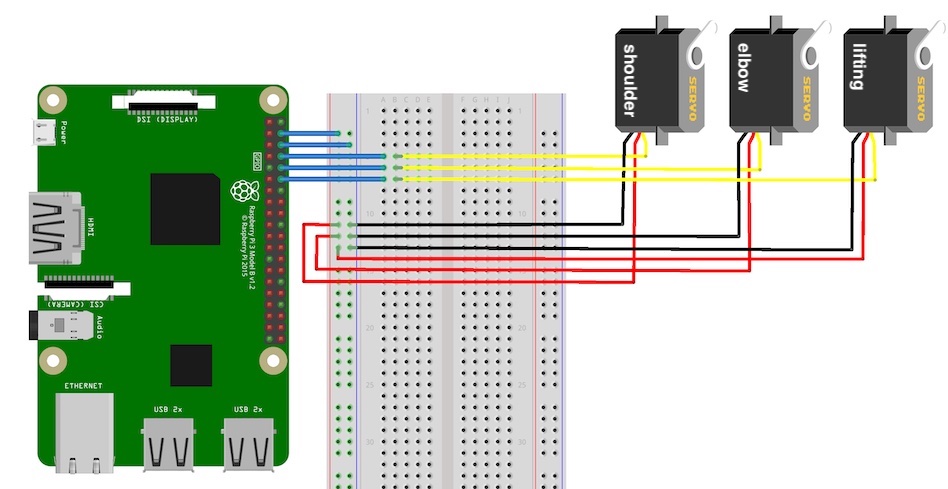
If you have a breadboard, you can wire the servos up so:
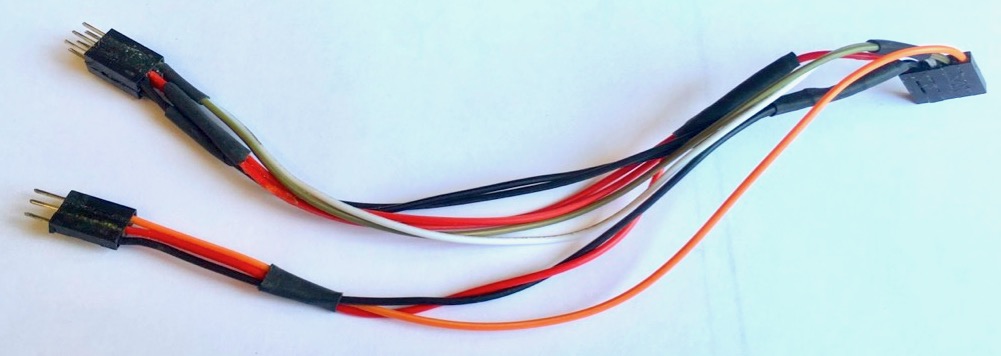
I prefer to solder a little wiring loom out of jumper cables, that the servo’s leads connect to, so that they all share a single connector for 5V, and a single connector for Ground. That way, you can use just 5 pins on the Raspberry Pi, all next to each other. It looks like this:
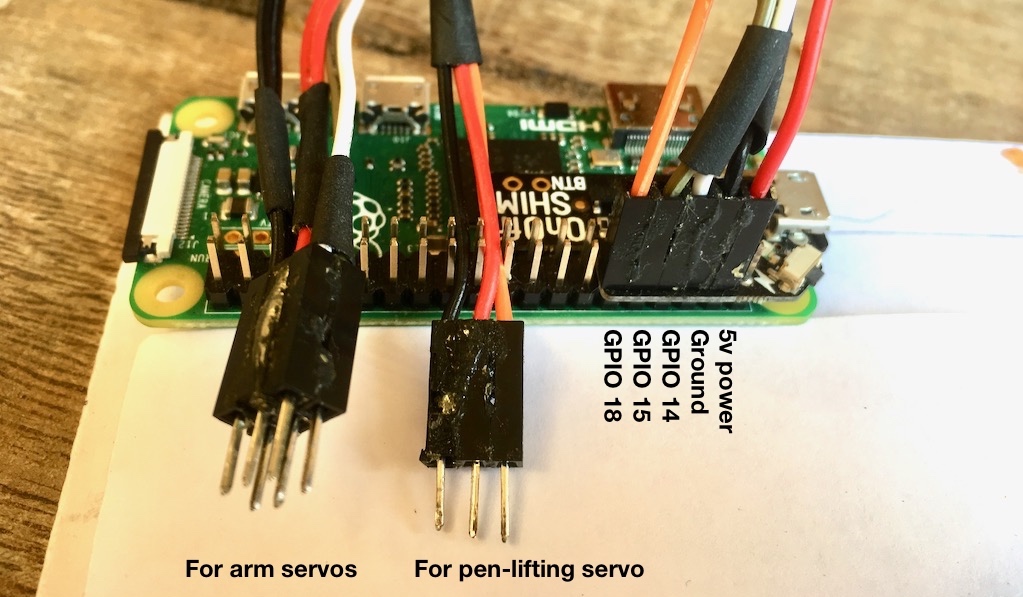
This connects to the Raspberry Pi like so:
3.1. Check the connections#
Double-check each connection all the way from the servo to the Raspberry Pi.
servo lead |
GPIO pin |
physical pin |
|---|---|---|
all 5V leads |
any 5V power pin |
2 or 4 |
all Ground leads |
any Ground pin |
6, 9, 14, 20, 25, 30, 34, 36, 39 |
shoulder motor signal |
14 |
8 |
elbow motor signal |
15 |
10 |
lifting motor signal |
18 |
12 |
Note
https://pinout.xyz has some useful information about the pins.